 |
|
|
|
|
|
 |
|
|
'Type
in your company slogan here' |
|
|
04-09-2009 18:07 |
|
|
 |
|
 |
|
|
|
Other balancers |
|
nBot |
|
uBot |
|
Your Link |
|
Your Link |
|
Your Link |
|
Your Link |
|
Text
Box |
|
Use this box to type any
specials, new updates or even gallery pics here. |
|
|
Robots
- Two wheeler - Introduction
|
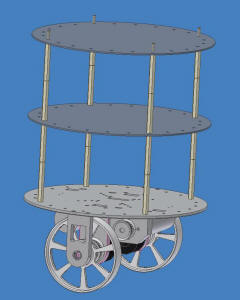 Originally
inspired by David.P.Anderson's
nBot and the
university of Massachusetts inverted pendulum robot
uBot here's my shot at a two wheel balancing robot.
I realised, from the
beginning, that this wasn't going to be an easy project so I
decided to divide the task in steps.
Mechanical platform
& motors
Motordrivers
PIC-based
controllerboard
Inertial
measurements unit
Code, code,
code
Sensors
More code
Since I
already had a suitable platform to use as testbed I
decided to use that to begin with.
The problem was
that I didn't have any wheels for it. So back to the drawingboard.
Making
the wheels.
Pole balancing
Get rid of those
support "wheels"
Rebuliding the base.
Motorcontroller
Cheating a bit
(using SHARP sensors)
<NEXT>
Originally
inspired by David.P.Anderson's
nBot and the
university of Massachusetts inverted pendulum robot
uBot here's my shot at a two wheel balancing robot.
I realised, from the
beginning, that this wasn't going to be an easy project so I
decided to divide the task in steps.
Mechanical platform
& motors
Motordrivers
PIC-based
controllerboard
Inertial
measurements unit
Code, code,
code
Sensors
More code
Since I
already had a suitable platform to use as testbed I
decided to use that to begin with.
The problem was
that I didn't have any wheels for it. So back to the drawingboard.
Making
the wheels.
Pole balancing
Get rid of those
support "wheels"
Rebuliding the base.
Motorcontroller
Cheating a bit
(using SHARP sensors)
<NEXT>
|
|
|
|
|
Copyright 2006 Henrik Olsson. All Rights Reserved.
Template downloaded from:
FrontPage Templates |
